روش راه اندازی استپ موتور 4 سیمه
آشنایی با استپ موتورها
در ابتدا برای یادگیری روش راه اندازی استپ موتور 4 سیمه بهتر است با استپ موتور آشنا شوید. استپ موتورها نوعی موتور قدرتمند برای کنترل موقعیت هستند. در واقع این تجهیزات نوع خاصی از موتورهای بدون جاروبک می باشند و در پرینترهای رومیزی و دستگاه های سی ان سی و پرینترهای سه بعدی استفاده می شوند. به طور کلی در هر چیزی که به کنترل دقیق موقعیت نیاز داشته باشد این تجهیزات مورد استفاده قرار می گیرند. برای راه اندازی این تجهیزات به یک استپ موتور نما 17 یا استپ موتور با ابعاد دیگر نیاز دارید. دقت داشته باشید که استفاده از این موتور سبب می شود تا هزینه راه اندازی دستگاه شما در مقایسه با سروو موتور ها کاهش پیدا کند. بنابراین کار با آن ها بسیار راحت بوده و به راحتی راه اندازی می شوند. البته استپ موتورها امروز کاربرد بسیار گوناگونی دارند و علاوه بر موارد اشاره شده در پرینترهای جوهرافشان و اسکنرها و لنز بعضی از دوربین ها استفاده می شوند. در ادامه بیشتر در مورد این تجهیزات صحبت می شود.

استپ موتور های 4 سیم در ابعاد و گام های متفاوتی وجود دارند ، که در لیست زیر برخی از این استپ موتور ها رو مشاهده میکنید


استپ موتور نما 17 دو فاز 1/8 درجه گشتاور 7 کیلوگرم سانتی متر 4 سیم 17HDB401-01N برند MOONS استوک
موجود در انبار

عملکرد استپ موتورها چگونه است؟
برای اینکه با این موتورها بیشتر آشنا شوید بهتر است در مورد عملکرد آنها اطلاعاتی داشته باشید. در این تجهیزات برای دوران یک پله از ۴ آهن ربای الکتریکی و چرخ دنده استفاده می کنند. توسط سیم پیچ خاصیت مغناطیسی ایجاد می شود که سبب جذب نزدیکترین دندانه استاتور چرخ می شود. در نهایت با استفاده از این خاصیت مغناطیسی موتور به حرکت در می آید. همانطور که اشاره کردیم این تجهیزات در سیستم هایی که به موقعیت دقیق و زاویه دقیق نیاز دارند استفاده می شوند. برای اینکه بتوانید در مورد روش راه اندازی استپ موتور 4 سیمه اطلاعاتی بدست آورید بهتر است در درجه اول با درایور آشنا شوید. در ادامه در مورد این تجهیزات اطلاعاتی در اختیارتان قرار می دهیم.
آشنایی با درایور استپ موتور
همانطور که در قسمت قبل اشاره کردیم برای اینکه بتوانید استپ موتور با هر ابعادی مانند استپ موتور نما 23 را راه اندازی کنید به یک درایور موتور نیاز دارید. روش راه اندازی استپ موتور 4 سیمه با استفاده از این تجهیزات بسیار آسان است. دقت داشته باشد که این تجهیزات اقدام به دریافت کلاک PWM از میکرو کنترل کرده و آن را تبدیل به پالس و سیگنال قابل دریافت برای استپ موتور می کنند. درایور استپ موتور tb6600 یکی از بهترین درایور ها میباشد و ولتاژ کاری آن 9 تا 42 ولت دی سی است. این درایورها می توانند تا 4 آمپر جریان را تامین کنند
راهاندازی استپ موتور چهار سیمه 1.8 درجه با درایور TB6600 و آردوینو UNO R3 CH3406
قطعات و ابزارهای مورد نیاز
- استپ موتور چهار سیمه 1.8 درجه
- درایور TB6600
- برد آردوینو UNO R3 (CH3406)
- منبع تغذیه 12 تا 24 ولت (مطابق با مشخصات موتور)
- سیمکشی و بردبرد برای اتصالها
- کابل USB برای برنامهریزی آردوینو
اتصالات سختافزاری
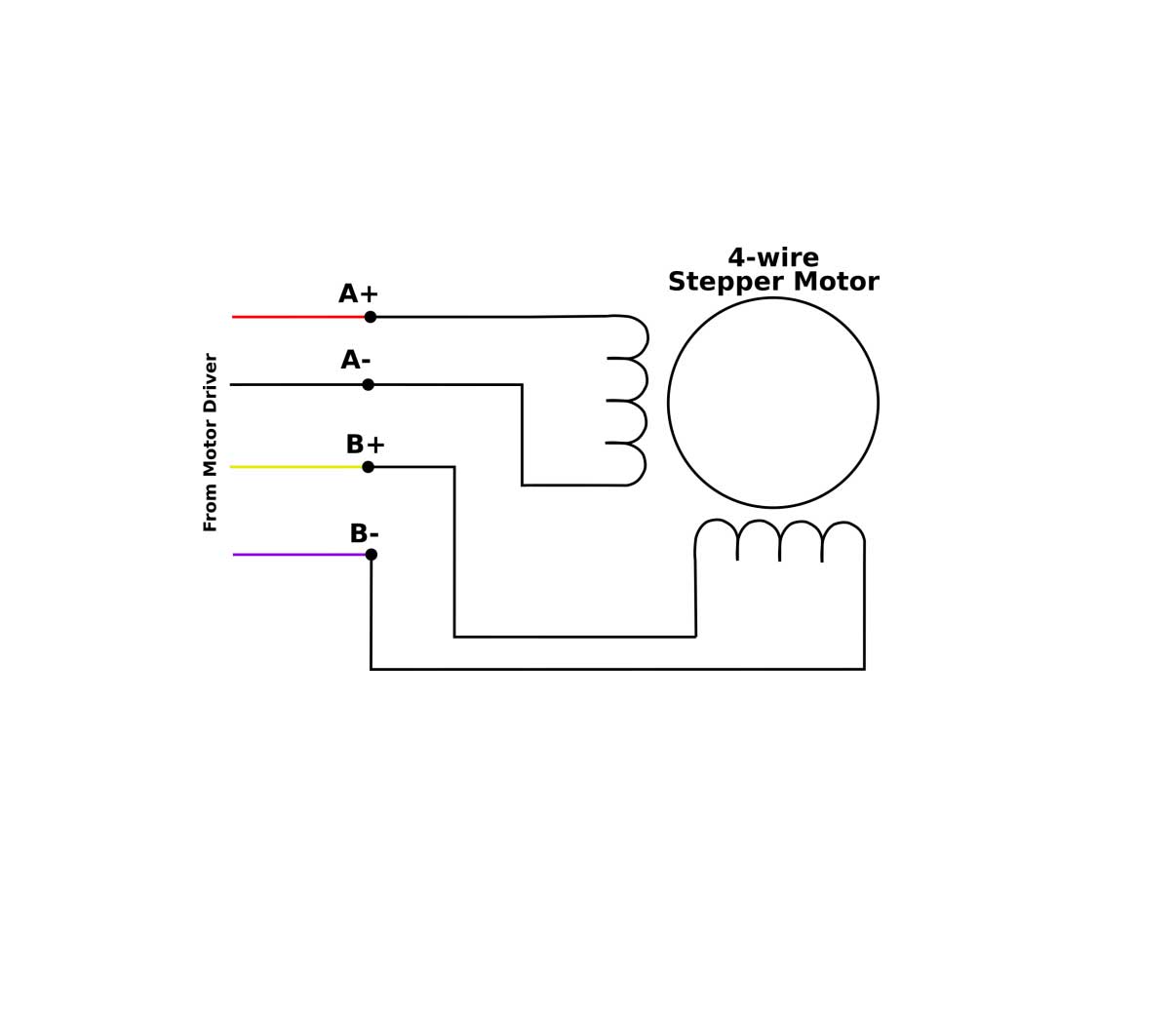
اتصال موتور به درایور TB6600
استپ موتور چهار سیمه دارای دو جفت سیم (کویلها) است. برای شناسایی جفت سیمها از مولتیمتر استفاده کنید. جفت سیمها را به پایانههای +A، -A، +B، و -B در درایور متصل کنید.شناسایی جفت سیمهای استپ موتور با مولتیمتر
استپ موتور چهار سیمه دارای دو سیمپیچ مجزا (دو کویل) است. برای راهاندازی صحیح موتور، لازم است جفت سیمهای مربوط به هر سیمپیچ را شناسایی کنید. با استفاده از مولتیمتر میتوانید این جفتها را بهسادگی شناسایی کنید.
مراحل شناسایی:
تنظیم مولتیمتر
مولتیمتر را روی حالت تست مقاومت یا حالت بوق (Continuity) تنظیم کنید.انتخاب دو سیم برای آزمایش
چهار سیم موتور را در نظر بگیرید و دو سیم را انتخاب کنید. این سیمها ممکن است به یک سیمپیچ متصل باشند یا نه.اتصال پروبهای مولتیمتر
پروبهای مولتیمتر (قرمز و مشکی) را به دو سر سیم انتخابی متصل کنید.بررسی مقاومت یا بوق
- اگر مولتیمتر مقاومت کمی (معمولاً بین 1 تا 10 اهم) نشان داد یا بوق زد، این دو سیم به یک سیمپیچ متصل هستند و جفت یکدیگرند.
- اگر مولتیمتر مقاومت بالا یا بینهایت (OL) نشان داد، این دو سیم به یک سیمپیچ متصل نیستند.
تکرار فرآیند برای سیمهای باقیمانده
این آزمایش را برای تمامی ترکیبهای ممکن از سیمها انجام دهید تا جفت سیمهای مربوط به دو سیمپیچ شناسایی شوند.
نتیجه
پس از شناسایی:
- یک جفت سیم را به پایانههای +A و -A در درایور TB6600 وصل کنید.
- جفت دیگر را به پایانههای +B و -B وصل کنید.
نکات مهم:
- در حین آزمایش، مطمئن شوید که موتور به هیچ منبع تغذیهای متصل نیست.
- اگر سیمها به درستی جفتبندی نشوند، موتور ممکن است به درستی کار نکند یا گشتاور مناسبی تولید نکند.
با این روش، بهسادگی جفت سیمهای استپ موتور شناسایی میشوند و میتوانید به مرحله بعدی راهاندازی بروید.
- سیمهای جفت اول: +A و -A
- سیمهای جفت دوم: +B و -B
اتصال درایور TB6600 به آردوینو
- پین PUL (پالس) در درایور به یکی از پینهای دیجیتال آردوینو (مثلاً D2).
- پین DIR (جهت) به یک پین دیجیتال دیگر آردوینو (مثلاً D3).
- پین ENA (فعالسازی) به یک پین دیجیتال (مثلاً D4).
- پینهای GND درایور و آردوینو را به هم متصل کنید.
اتصال منبع تغذیه به درایور
ولتاژ و جریان منبع تغذیه را مطابق با مشخصات موتور تنظیم کرده و به پایانههای +V و GND در درایور TB6600 متصل کنید.تنظیمات درایور TB6600
- تنظیم جریان خروجی: از دیپ سوئیچهای درایور استفاده کنید. جریان را مطابق با موتور تنظیم کنید.
- تنظیم تفکیک گامها (Microstepping): تعداد گامها را با توجه به نیاز پروژه تنظیم کنید.
کد آردوینو
برای کنترل استپ موتور، از کد زیر استفاده کنید:
#define PUL 2 // پین پالس
#define DIR 3 // پین جهت
#define ENA 4 // پین فعالسازی
void setup() {
pinMode(PUL, OUTPUT);
pinMode(DIR, OUTPUT);
pinMode(ENA, OUTPUT);
digitalWrite(ENA, LOW); // فعال کردن درایور
}
void loop() {
// چرخش موتور در جهت ساعتگرد
digitalWrite(DIR, HIGH);
for (int i = 0; i < 200; i++) { // 200 گام برای یک دور کامل
digitalWrite(PUL, HIGH);
delayMicroseconds(500);
digitalWrite(PUL, LOW);
delayMicroseconds(500);
}
delay(1000); // توقف یک ثانیه
// چرخش موتور در جهت پادساعتگرد
digitalWrite(DIR, LOW);
for (int i = 0; i < 200; i++) {
digitalWrite(PUL, HIGH);
delayMicroseconds(500);
digitalWrite(PUL, LOW);
delayMicroseconds(500);
}
delay(1000); // توقف یک ثانیه
}
توضیح کد
- تعریف پینها: پینهای PUL، DIR و ENA در آردوینو مشخص شدهاند.
- تنظیمات اولیه: پینهای مربوط به درایور به عنوان خروجی تعریف شدهاند و درایور فعال میشود.
- کنترل موتور: در حلقه اصلی، ابتدا موتور در جهت ساعتگرد و سپس در جهت پادساعتگرد میچرخد. تعداد گامها و سرعت چرخش با تغییر تعداد و زمان تأخیر قابل تنظیم است.
نکات مهم
- محافظت در برابر جریان اضافی: اطمینان حاصل کنید که جریان تنظیم شده در درایور از جریان مجاز موتور تجاوز نکند.
- تأمین توان کافی: از منبع تغذیهای با ولتاژ و جریان مناسب استفاده کنید.
- ایمنی: هنگام اتصال سیمها، منبع تغذیه خاموش باشد.
نتیجهگیری
با استفاده از این روش، میتوانید بهسادگی استپ موتور چهار سیمه را با درایور TB6600 و آردوینو UNO راهاندازی کنید. این راهاندازی پایهای است و میتوانید با افزودن قابلیتهای پیشرفته مانند کنترل سرعت و موقعیت دقیقتر، پروژههای حرفهایتری ایجاد کنید.
سلام و عرض ادب.
بنده میخوام یه مدار تست استپ موتور چهارسیم بدون داشتن هیچ سبستم کنترلی داشته باشم.یعنی به محض اعمال ولتاژ vcc, Gnd موتور شروع به چرخش کنه.حالا اگر تغییر جهت هم داشته باشه بهتر.برای شروع درایورtb6600 متناسب بود ولی نحوه سیم بندیش مشکل شده برام.مثلا نمیدونم پالس یا جهت یا enableکه هر سه مثبت و منفی دارن چطور بایستی بسته بشن.ممنون مبشم راهنمایی بفرمایین.
نحوه سیمکشی:
۱. اتصال برق و موتور:
VCC و GND موتور → به موتور پاور (مثلاً 12V/24V)
چهار سیم موتور → به ترمینال A+ A- B+ B- درایور طبق دیتاشیت موتور
۲. پایههای سیگنال:
حالت ساده فقط برای تست اولیه:
PUL+ → وصل به 5V
PUL- → به یک خروجی پالس ساده (مثلاً از NE555) یا حتی یک دکمه که سریع زده بشه
اگر نوسانساز ندارید، میتونید PUL- رو به GND وصل کنید و با سیم PUL+ لحظهای به 5V وصل و قطع کنید تا پالس تولید شه (نه پایدار، ولی برای تست اولیه کافیه).
جهت:
DIR+ → به 5V وصل کن
DIR- → یا به GND یا با یک کلید به GND/5V سوییچ کن که جهت تغییر کنه
اینیبل:
ENA+ → به 5V
ENA- → به GND
(یا اصلاً آزاد بذار، خیلی از ماژولها در صورت آزاد بودن این پایه فعال میمونن)
—
مدار پالس ساده با NE555:
اگر بخوای یه پالس اتومات بزنی که موتور بچرخه، با آیسی NE555 میتونی یک مدار آستابل بسازی که مرتب پالس بده:
خروجی NE555 → به PUL-
PUL+ به 5V
DIR+ به 5V
DIR- به GND
ENA+ به 5V
ENA- به GND
سلام قضیه این سیم وسط در استپ موتور های دو فاز چیه؟
این سیم وسط کاربردش چیه؟
کاربرد اصلی این سیم سادهسازی مدار راهانداز (درایور) موتور است.
نحوه کار: این سیم مشترک به ولتاژ مثبت منبع تغذیه متصل میشود. برای چرخاندن موتور، درایور فقط کافی است دو سر دیگر سیمپیچ را به نوبت به زمین (GND) متصل کند. با این کار، جریان در نصف سیمپیچ برقرار شده و قطب مغناطیسی مورد نظر ایجاد میشود. جهت جریان همیشه در یک جهت (از سیم مشترک به سمت زمین) است، به همین دلیل به آن “یونیپولار” یا “تکقطبی” میگویند.
مزیت اصلی:
مدار راهانداز ساده و ارزان: برای راهاندازی این موتورها به مدارهای پیچیدهای مانند H-Bridge (که در موتورهای بایپولار استفاده میشود) نیازی نیست. تنها با چند ترانزیستور ساده میتوان آنها را کنترل کرد.